


清华大学车辆国重杨殿阁教授团队在自动驾驶长尾场景研究上的创新成果,在滴滴RoboTaxi(自动驾驶出租车)上应用,并荣获滴滴集团盖亚灯塔计划最高荣誉——“杰出项目奖”,并同时获得由员工投票产生的“小桔人气奖”,滴滴联合创始人、滴滴自动驾驶公司CEO张博、滴滴技术副总裁赖春波在第三届产学研合作论坛上为获奖团队颁奖。这不仅充分体现了清华团队在自动驾驶前沿技术上的持续突破,也彰显了产学研深度合作推动产业落地中的重要价值。

图1 车辆国重杨殿阁教授团队荣获滴滴盖亚灯塔计划最高荣誉“杰出项目奖”
(左起:张博、何健默、刘春阳、杨殿阁、周伟韬、赖春波)
自动驾驶面临的长尾挑战
RoboTaxi是被认为未来共享出行的重要发展方向,是当前自动驾驶技术研究的热点,然而在真实道路环境中,车辆常常会遭遇一些少见却极具风险的复杂长尾场景,这些长尾场景往往超出了算法的设计边界,是制约RoboTaxi落地应用的核心难题,也是全球产业界和学术界共同关注的焦点。
创新方案与应用亮点
为应对这一技术挑战,清华大学车辆国重杨殿阁教授团队与滴滴自动驾驶,依托 “清华大学—滴滴出行未来出行联合研究中心”,联合开展应用研究,共同开发了面向产业落地的创新方案。项目研究结合VLM(视觉语言模型)和CoT(思维链)进行长尾场景的理解认知和识别,在滴滴的人工驾驶数据进行模仿学习场景基础上,结合强化学习实现长尾场景的应对,使滴滴自动驾驶系统能够在复杂长尾场景下做出更加安全可靠的决策。该方案显著降低了接管需求和潜在风险,提升了出行服务的安全性与可靠性。滴滴公司对项目成果高度评价,给出的获奖理由是“该项目在利用人类驾驶数据推动滴滴自动驾驶长尾问题解决方面取得显著突破,结合前沿自动驾驶技术,方案有效覆盖多数目标接管场景,落地应用成果丰硕,与产业合作紧密,具有明确的推广应用前景”。
团队长尾场景研究积累
清华大学车辆国重杨殿阁教授团队长期聚焦以长尾场景为核心的自动驾驶安全议题,在多年的探索中,团队形成了算法—系统—工具链—应用的全链条创新布局:在国际顶级期刊 Nature Machine Intelligence、Nature Communications、IEEE T-ITS等发表了一系列具有原创性的成果,提出了能够保证自动驾驶学习性能单调提升、解析接管原因以改进学习、动态应对长尾风险、多模态输出覆盖复杂场景等方法和技术,构建了自动驾驶长尾场景研究的系统框架。团队还自主研发并开源了 SPIDER 算法库及工具链(https://github.com/Thu-ADLab/SPIDER),成为该领域的重要开源算法平台。相关成果在滴滴Robotaxi及国内外知名车企的无人驾驶小巴,量产车辆辅助驾驶系统中应用,以及在北京冬奥自动驾驶示范等重大项目中得到应用落地验证,并在 2024 年美国 Mcity 自动驾驶挑战赛中击败MIT等竞争对手斩获世界冠军。
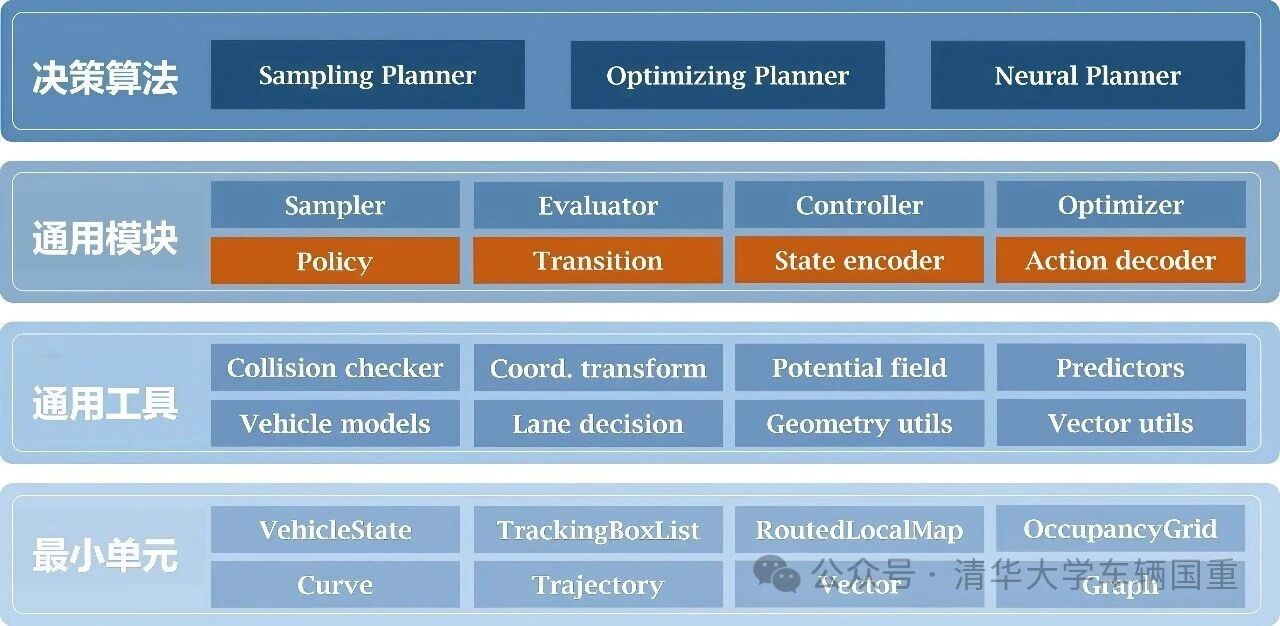
图2. SPIDER算法工具链总体架构
针对自动驾驶长尾难题,车辆国重杨殿阁教授课题组与滴滴自动驾驶保持长期紧密合作关系,项目团队成员还包括江昆副研究员、杨蒙蒙助理研究员。
在本项目中,博士后周伟韬、博士/硕士研究生钱泽林、温俊泽、刘昭阳等负责技术架构设计、算法实现及工具链构建,他们在产学研一体化合作中快速成长,在算法建模、系统验证与工程实现等环节作出了关键贡献。合作方滴滴自动驾驶团队的刘春阳、何健默、沙翔等滴滴专家深度参与,推动了研究成果与实际运营场景的高效结合。
展望未来
未来,清华大学车辆国重将继续携手滴滴,依托“清华大学—滴滴出行未来出行联合研究中心”,围绕未来出行系统中的核心难题持续开展前沿探索。中心自成立以来,在科研合作和人才培养方面已取得丰硕成果。杨殿阁教授团队也将进一步深化在自动驾驶安全性与可信性方向的研究,推动理论方法与产业落地紧密结合,共同助力构建安全、绿色、智能的未来出行体系。
附相关成果链接(需复制网址到浏览器阅读)
1. Continuous improvement of self-driving cars using dynamic confidence-aware reinforcement learning,Nature Machine Intelligence,2023(https://www.nature.com/articles/s42256-023-00610-y)
2. Adaptive spatial-temporal information processing based on in-memory attention-inspired devices,Nature Communication.(https://www.nature.com/articles/s41467-025-62868-7)
3. DRARL: Disengagement-Reason-Augmented Reinforcement Learning for Efficient Improvement of Autonomous Driving Policy,IEEE IROS,2025(https://arxiv.org/pdf/2506.16720)
4. Agentthink: A unified framework for tool-augmented chain-of-thought reasoning in vision-language models for autonomous driving,EMNLP,2025(https://arxiv.org/pdf/2505.15298)
5. Dynamically conservative self-driving planner for long-tail cases,IEEE T-ITS,2022(https://ieeexplore.ieee.org/abstract/document/9971752/)