


随着自动驾驶技术不断走向落地实战,车辆在真实路况中常遭遇极端天气、拥堵的道路、复杂交叉路口等边缘场景,这类长尾问题对感知系统的实时性、适应性与能效提出了极高要求。现有基于传统架构的感知系统往往难以兼顾响应速度与动态调整能力,亟需在信息处理范式层面实现突破。
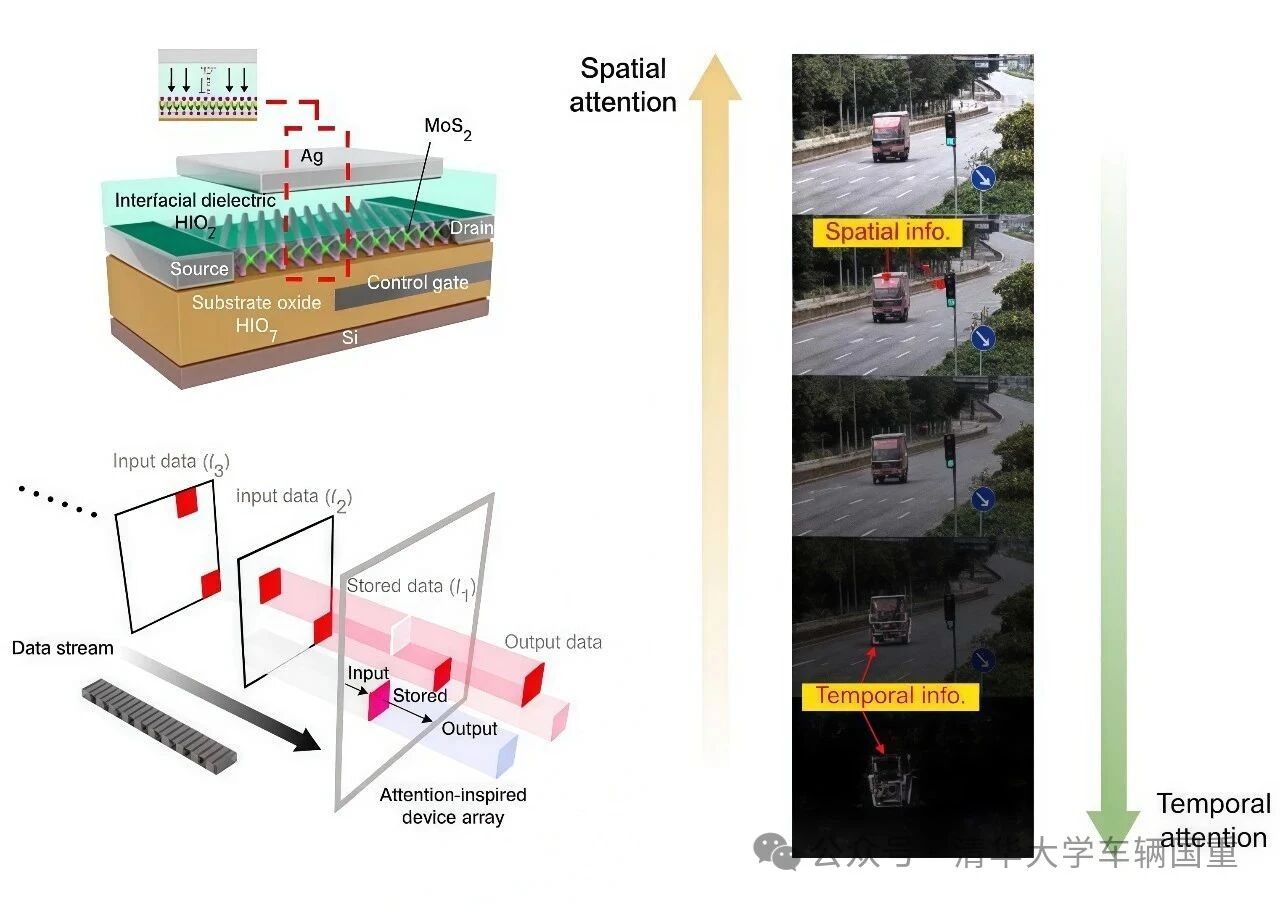
图1. 注意力启发器件结构;适应性时空信息处理流程;利用注意力数值,动态调整时间和空间信息的响应强度
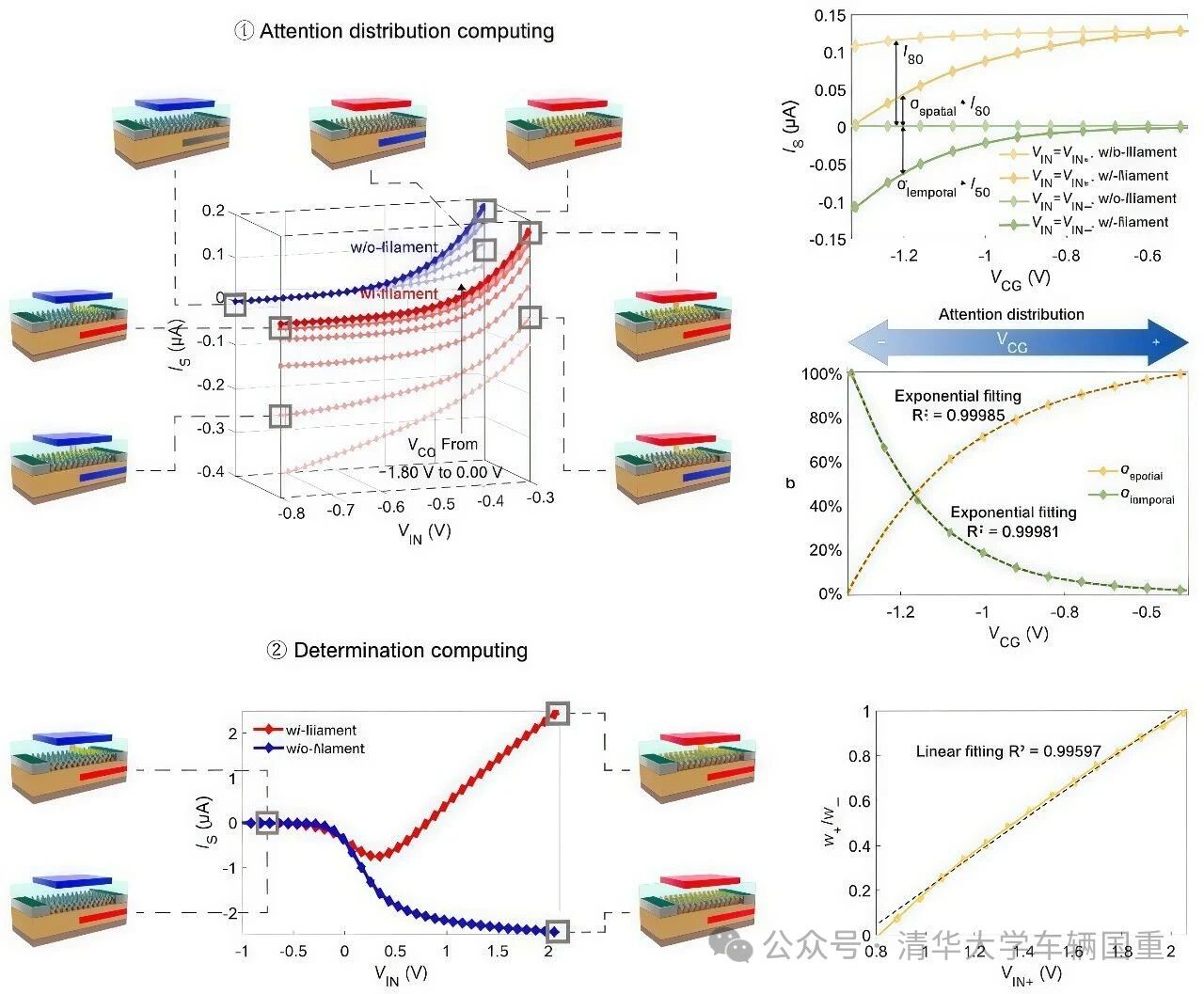
图2. 注意力启发器件在各计算模式下的特性曲线
清华大学集成电路学院任天令教授团队在新型存内计算系统领域取得最新突破,发明了基于异质维度界面调控的存内注意力启发器件,该器件模仿人脑注意力机制,可动态分配计算资源,实现对关键时空信息的增强提取与冗余信息的抑制。
车辆国重杨殿阁教授团队与集成电路学院任天令教授团队合作开展了学科交叉创新,将基于异质维度界面调控的存内注意力启发器件应用于自动驾驶环境感知、场景理解任务中。
杨殿阁教授团队的具体贡献为将存内注意力启发器件融入路侧、云端及车端感知系统中,实现了对动静态场景结构解析、交通参与者动态行为检测等场景感知理解任务的硬件级优化。实测结果表明,该技术显著提升了系统在边缘场景中的处理效能:存内注意力启发器件可将处理延迟降低至微秒级,相比传统架构提速超过10倍;能耗降至皮焦耳级别,能效提升高达3个数量级。在宽敞街道、拥堵路段和交叉路口三类典型场景中,系统能够根据环境复杂度动态调节注意力分配策略。本研究验证了存内计算架构在自动驾驶系统中的工程可行性,为破解自动驾驶边缘场景的感知瓶颈提供了硬件层面的创新解决方案。
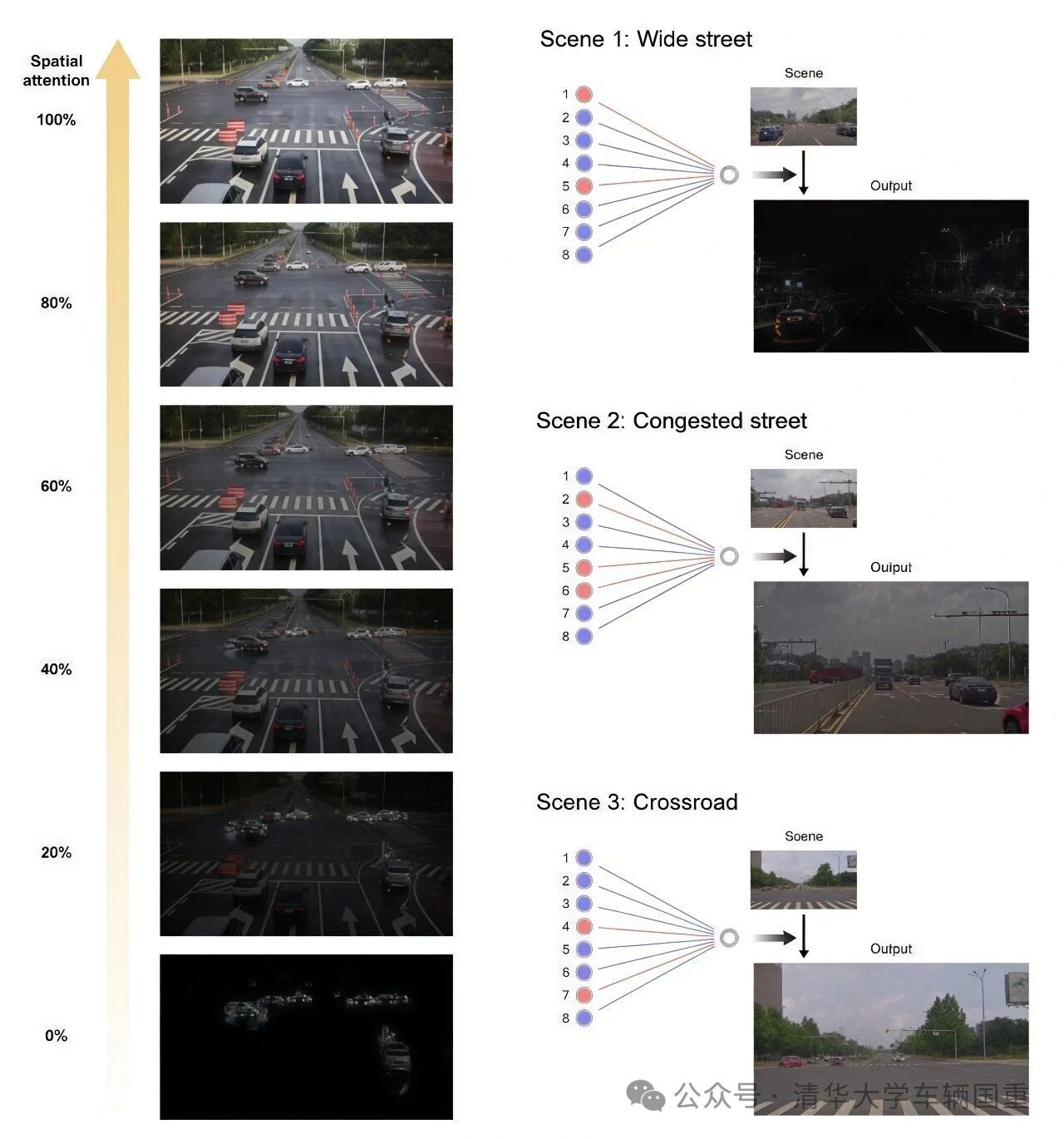
图3. 适应性时空信息处理应用于边缘智能设备
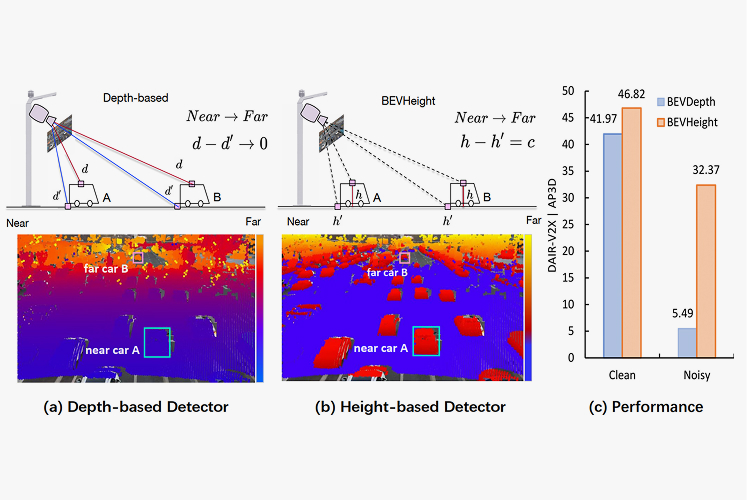
该研究成果是杨殿阁教授团队围绕安全可信高级别自动驾驶系统的系列成果之一。此前,杨殿阁教授团队所提出的自动驾驶系统持续进化方法已发表于Nature Machine Intelligence,所提出的多传感器BEV融合感知方法已发表于TNNLS、CVPR、ICCV等国际顶级期刊和会议中。该研究成果将进一步提升自动驾驶车辆在复杂极端环境下的应对能力,能够支撑自动驾驶系统的持续进化,有望解决自动驾驶在长尾场景中的安全性难题。